Patents
NPAT374’20 – Roll Padding in Neural Networks Convolutional Layers
- Inventor: Rui Jorge Pereira Gonçalves, Fernando Manuel Ferreira Lobo Pereira
- Responsible: Rui Jorge Pereira Gonçalves
- Date on which U.Porto Inovação received the communication of invention: 27/04/2020
- Manager1: Cláudio Santos
- Manager2: Filipe Castro
- Technical Analyst: João Fonseca
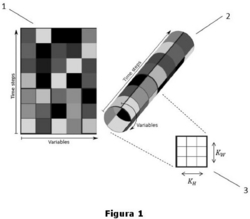
NPAT375’20 – Multi Convolutional Attention Mechanism in Multivariable Time Series
- Inventor: Rui Jorge Pereira Gonçalves, Fernando Manuel Ferreira Lobo Pereira
- Responsible: Rui Jorge Pereira Gonçalves
- Date on which U.Porto Inovação received the communication of invention: 27/04/2020
- Manager1: Cláudio Santos
- Manager2: Filipe Castro
- Technical Analyst: João Fonseca
NPAT376’20 – ConvLSTM2D Multi Conv 2D Attention with Roll Padding for MTS with cyclic properties
- Inventor: Rui Jorge Pereira Gonçalves; Fernando Manuel Ferreira Lobo Pereira; Vítor Miguel de Sousa Ribeiro
- Responsible: Rui Jorge Pereira Gonçalves
- Date on which U.Porto Inovação received the communication of invention: 27/04/2020
- Manager1: Cláudio Santos
- Manager2: Filipe Castro
- Technical Analyst: João Fonseca
WO/2016/084017 – Energy Harvesting Device for a Transport Vehicle
- Inventors: Adriano da Silva Carvalho; Bruno Filipe Azevedo Costa; José Manuel Ferreira Duarte; José Ricardo Sousa Soares; Justino Miguel Neto de Sousa; Rodrigo Manuel Marinho Pires.
Prototypes
APP for chest x-ray images diagnose
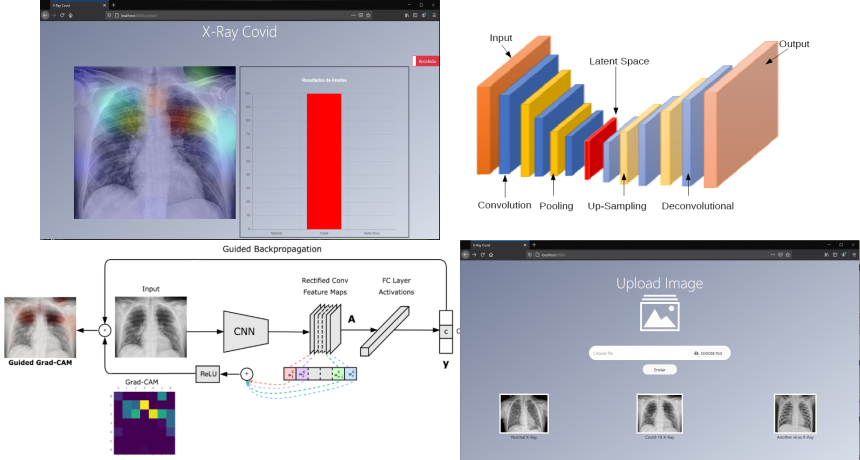
This app outputs the probability of COVID 19 infection and marks the pulmonal-affected areas, using Deep Learning framework, classification model and an autoencoder.
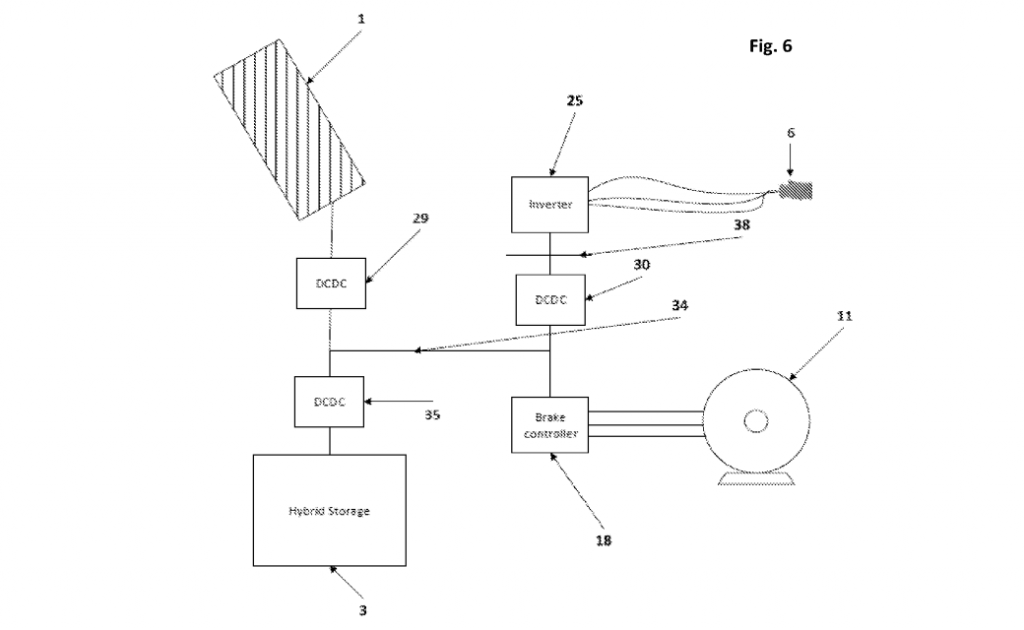
ASA – Solar Autonomous Research Aircraft
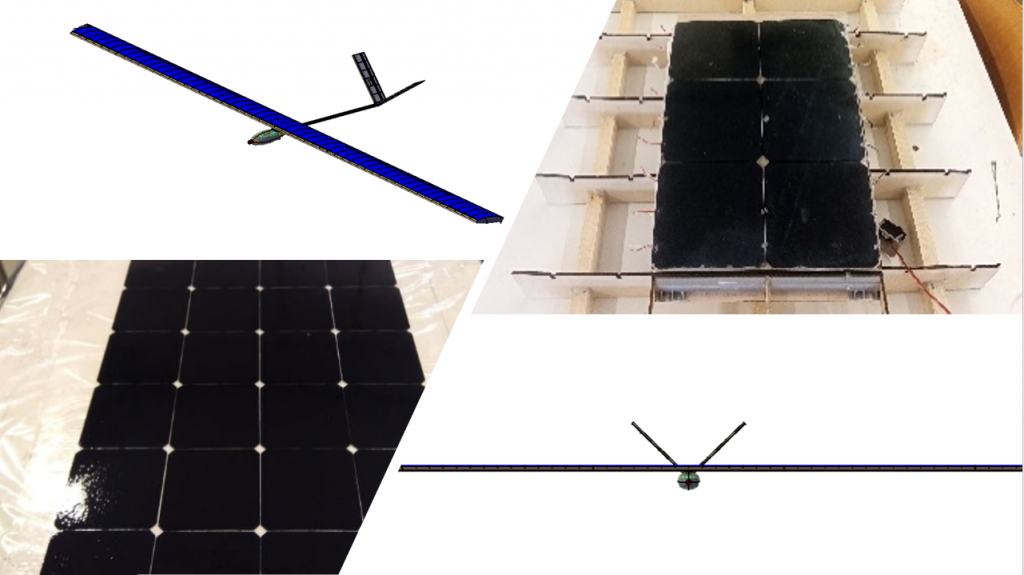
Research and development of low-cost solar UAV with 24/7 non-stop endurance with the objective for monitoring large area for wildlife protection and forest fire detection. Currently, in the first prototype phase
UPWIND UAV
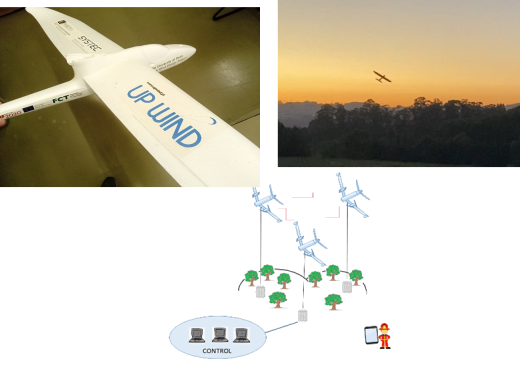
Among novel technologies for producing electricity from renewable resources, a new class of wind energy converters has been conceived under the name of Airborne Wind Energy Systems (AWESs). This new generation of systems employs flying tethered wings or aircraft to reach winds blowing at atmosphere layers that are inaccessible by traditional wind turbines.
The UPWIND – Multi-Kite System to Harvest High Altitude Wind Power – uses a simple new wind energy concept based on airborne rotary power generation and tensile rotary power transfer to the ground.
TURTLEBOT drone
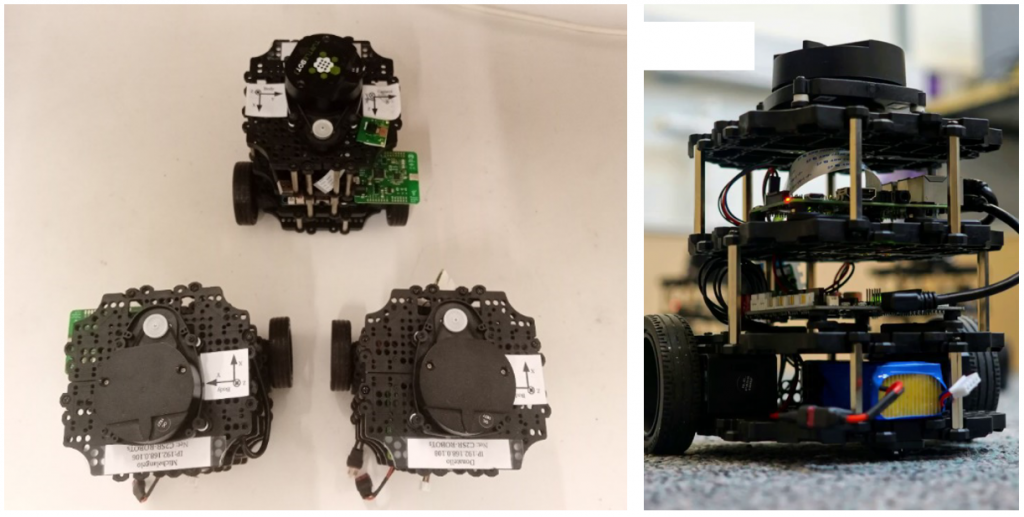
The TurtleBot3 drones are tools for experimental testing of autonomous navigation, control, estimation, and artificial intelligence algorithms developed by the ISR-Porto researchers. The TurtleBot3 is a mobile robot of the unicycle type, and it has been used for validating path following control, localization and mapping and reinforcement learning algorithms.
CRAZYFLIE drones
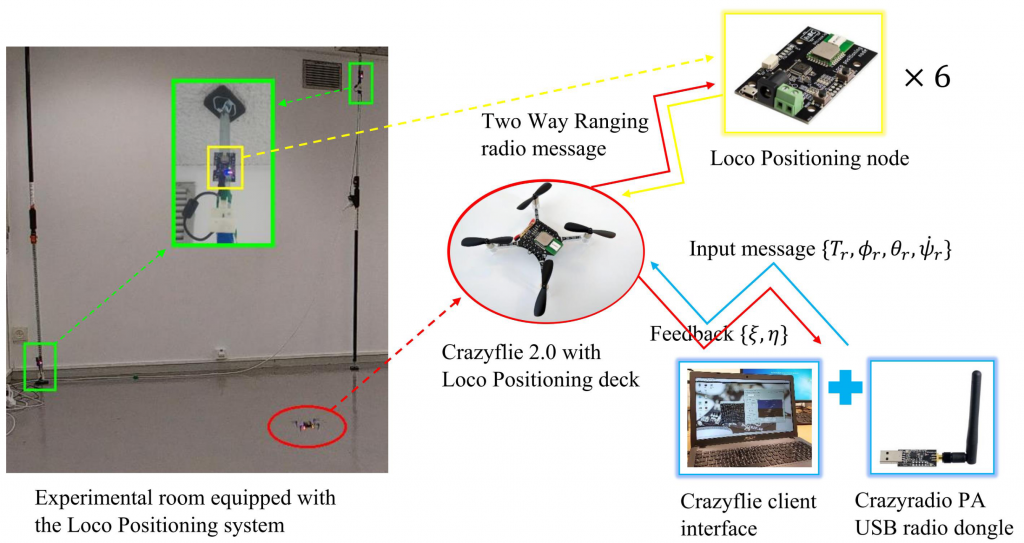
The Crazyflie drones are tools for experimental testing of autonomous navigation, control, estimation, and artificial intelligence algorithms developed by the ISR-Porto researchers. The Crazyflie drones will be used for testing robot navigation techniques such as autopilot controllers, cooperative control, multi-agent reinforcement learning and safety-critical control.
CRSA Drone
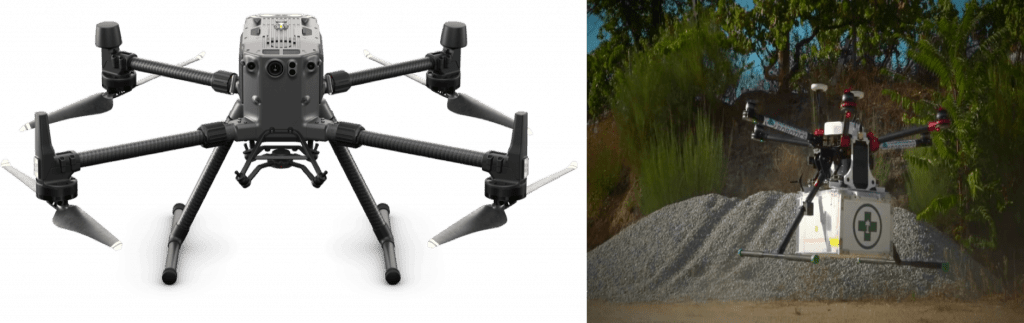
Development of a system for delivering orders by drones to the homes of sick or quarantine users.
Long-distance delivery systems, with automatic route planning systems, and accurate delivery systems in tight spaces have been enhanced to enable home deliveries to isolated patients, or between health and care facilities.
NIMBUS VTOL Drone
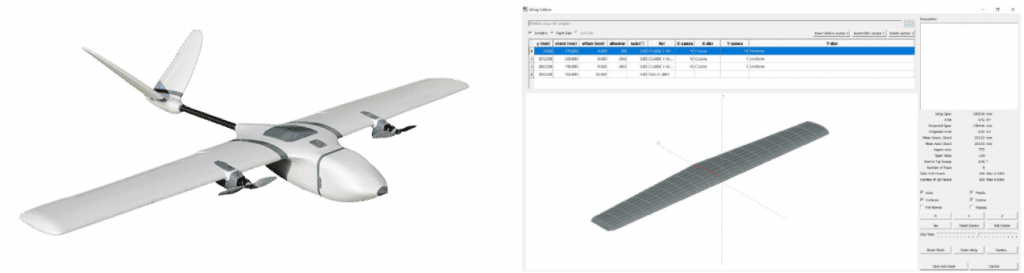
Low-cost fixed-wing UAV intended for missions to acquire entry-level and mid-level operation data and information. The concepts of fixed-wing mini-UAVs make it necessary for users to have adequate knowledge regarding flight performance and operation in order to select the best type of aircraft for the required mission.
Used for preliminary aerodynamic analysis for a classic operational UAV configuration (MFD Nimbus), centered on the 2D airfoil and 3D wing geometry and for the development of control models, constraints, aerodynamic performance, aerodynamic interference estimation, etc.
CRSA Web interface
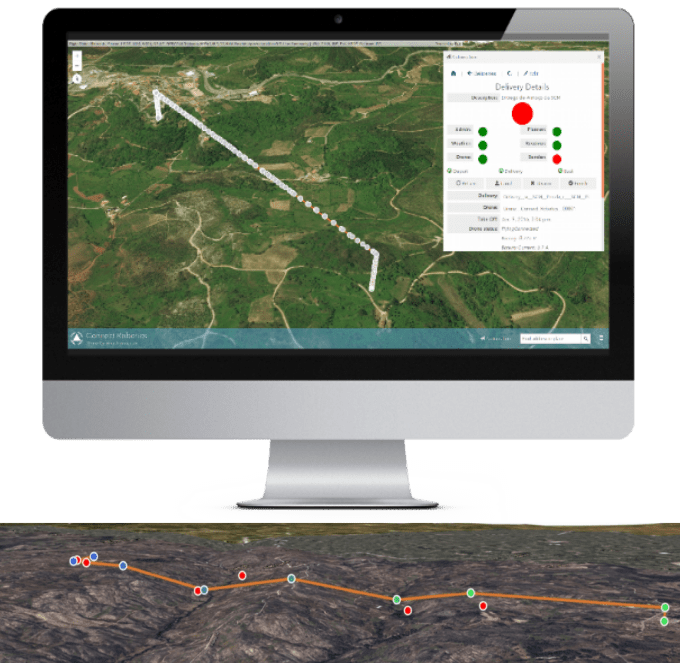
To track all our drones in real time, follow delivery status (both sender and receiver), check security approvals, define new deliveries, setup warehouses, setup consumers, setup and manage destinations, abort flights, etc, a user-friendly web interface was created.
3D – Factories for Kid
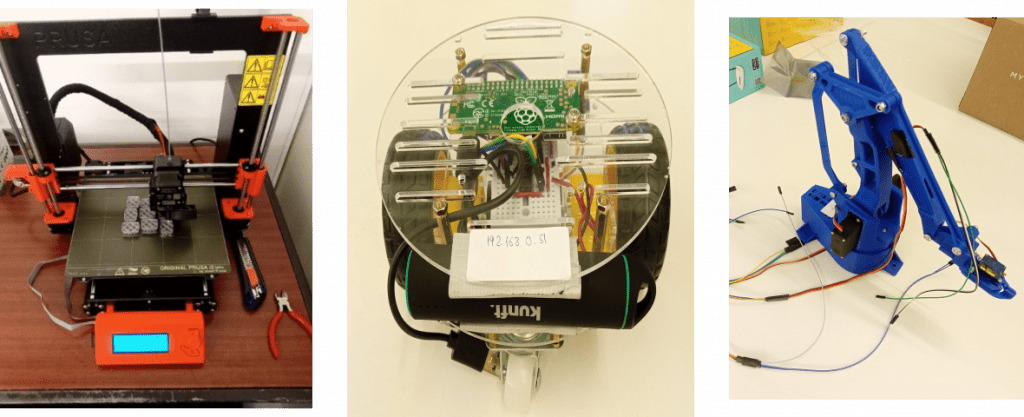
Prototypes for advanced education and training activities and sustainable technology transfer, with the main goal to involve high school students with subjects related to the smart manufacturing paradigm and its technologies. This prototype was also used for Teaching Factories for Kids (TF4Kids) activities, consisted in making available to students’ pedagogical materials, to develop a 3D printable production line. This production line makes use of various technologies related with Cyber-Physical Systems and their application in industrial scenarios.
Robotic ARM and stereo cam system
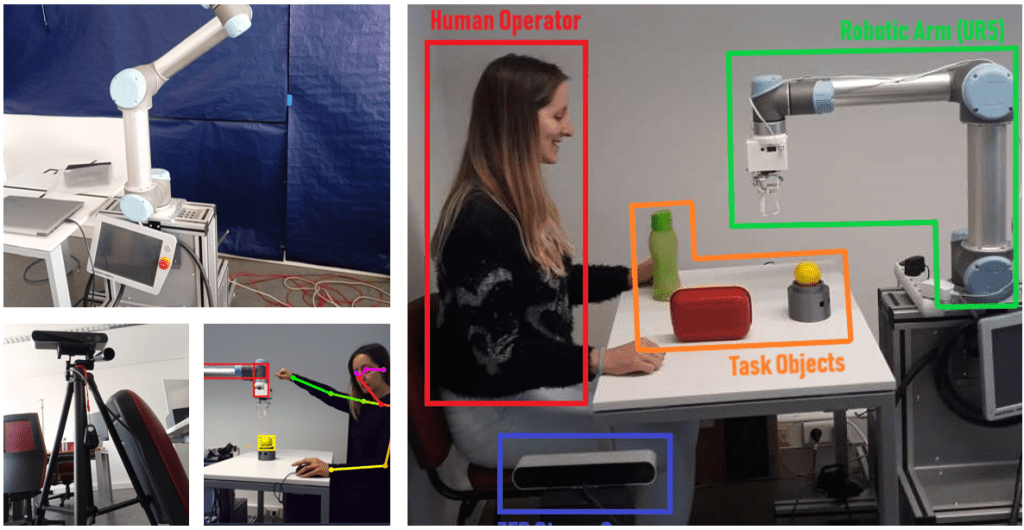
In the context of collaborative robotics, an integration of vision systems with a collaborative robotic arm (such as the UR5) allows for a wide range of useful applications for the industry. From typical grasping applications, a collaboration between human operator and robot in storage or assembly processes. A camera makes it possible to acquire data, which after processing and analysis, provide relevant information to the robot. This information offers a higher level of perception to the robot, allowing it to locate human objects and other objectives.
DIGI2 Cluster

Deployment and validation of cyber physical systems towards an implementation of edge computing solutions involving distributed control systems. Through the use of multiple machines, a digital twin solution based on micro-services for data ingestion, processing and synchronization can take active participation at the shop-floor as key enabler technology.
WavyHub
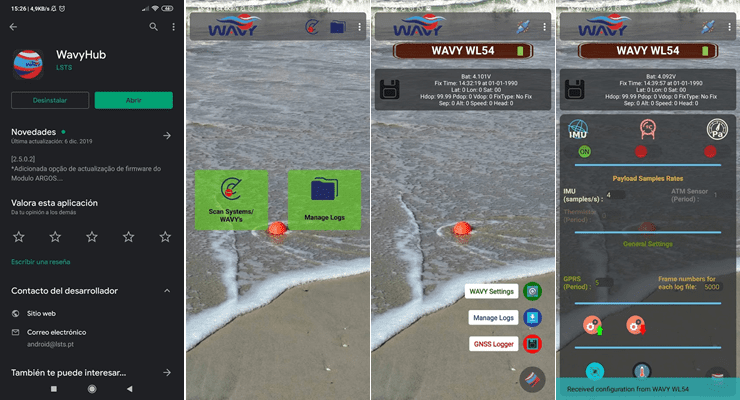
Mobile app developed to support the deployment of the WAVY drifters. The WavyHub is used to set the WAVY drifters before the operations.
WAVY SOFTWARE ECOSYSTEM
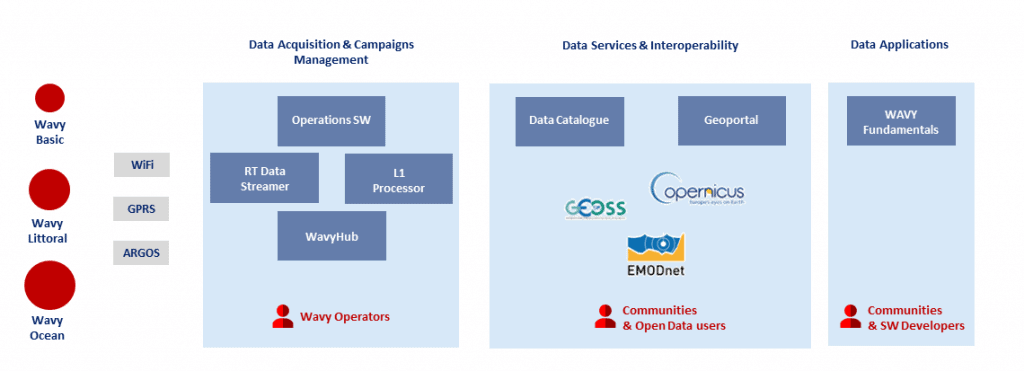
The WAVY drifters being developed in the scope of MELOA produce data with far-reaching applications, directly providing valuable information that will help to derive answers to scientific, environmental, and societal needs covering a wide range of topics. For this purpose, we created a complete WAVY Software Ecosystem to support the deployment of the WAVY drifters.
WAVY Drifters

MELOA offers a solution to extend and improve the current in situ ocean observing and monitoring systems, in the form of WAVY drifter’s devices. The low-cost, sturdy, and multi-purpose surface drifters are a new generation of sustainable platforms, easy to embed in different types of marine observation systems.
CAST
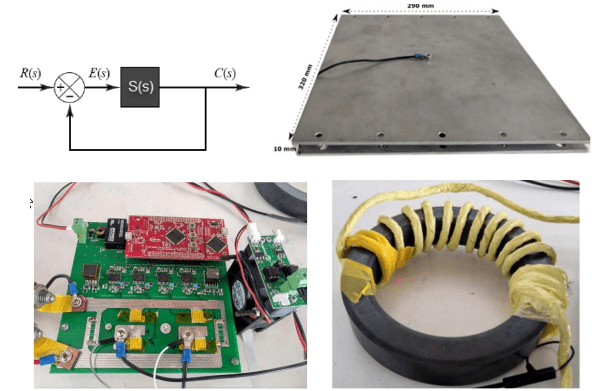
During the development phase of the prototype for high-frequency chestnut disinfestation, installed in the laboratory, progress was made to optimize the exposure time and tension to be applied to each batch of calibrated chestnuts of the different varieties (Longal, Judia, Côta, Boaventura and Martainha).
The disinfection prototype is based on the application of high frequency (1MHz zone) and high voltage (approximately 1KV) to a chamber where the nuts are inserted.
Given the needs and specifications imposed in this application, the cascaded H bridge topology was chosen for the converter, using in the implementation of semiconductors of the gallium nitride technology, with chemical formula GaN – semiconductor material, capable of changing an insulating composition (which does not allow the transfer of energy) to a conductor (capable of transmitting energy) with great ease. This semiconductor technology was chosen because it is the most suitable for applications where low switching times are required.
The development of this converter started with the analysis of the topology in a simulation environment.
For this purpose, Matlab & Simulink was used to simulate an electrical circuit capable of applying high frequency to a capacitor, a representative element of the disinfestation chamber.
To bring the simulation closer to the final prototype, the value of the capacitor was calculated based on the dimensions of a small-scale prototype – chamber with 320x290mm.